Go to the source code of this file.
Functions | |
| int | wait_robot (robot *rob, unsigned int delay) |
| bool | poke (robot *rob, int addr, int value) |
| int | peek (robot *rob, int addr) |
| int | go_to (int num) |
| int | randoms (int num) |
| int | cardinal (arena *arena) |
| int | self (robot *rob) |
| int | state (arena *arena, int num) |
| int | speed (robot *rob) |
| double | gpsx (arena *arena, int num) |
| double | gpsy (arena *arena, int num) |
| void | engine (robot *rob, double angle, double speed) |
| bool | shoot (robot *rob, arena *arena, double angle, double explo_dist) |
| double | angle (double x1, double y1, double x2, double y2) |
| double | targetx (double x1, double angle, double length) |
| double | targety (double y1, double angle, double length) |
| double | distance (double x1, double y1, double x2, double y2) |
Function Documentation
◆ angle()
| double angle | ( | double | x1, |
| double | y1, | ||
| double | x2, | ||
| double | y2 | ||
| ) |
Calculate the angle corresponding to the line from [x1,y2] to [x2,y2]. If [x1,y1] == [x2,y2] it'll for now return an angle of 90°c.

◆ cardinal()
| int cardinal | ( | arena * | arena | ) |
return the number of active robot in the arena [arena].

◆ distance()
| double distance | ( | double | x1, |
| double | y1, | ||
| double | x2, | ||
| double | y2 | ||
| ) |
Return the distance between [x1,y1] and [x2,y2].
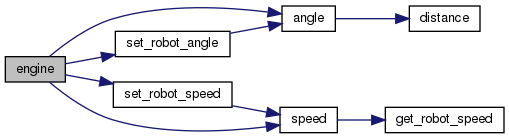
◆ engine()
| void engine | ( | robot * | rob, |
| double | angle, | ||
| double | speed | ||
| ) |
Start a robot [rob]'s engine and set his angle to [angle] and speed to [speed].
◆ go_to()
| int go_to | ( | int | num | ) |
return num.
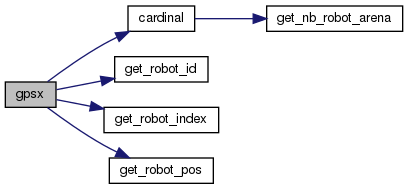
◆ gpsx()
| double gpsx | ( | arena * | arena, |
| int | num | ||
| ) |
return the x coordinate of the robot contained the id [num] in the arena [arena]. Return -1 if no robot has the id [num].
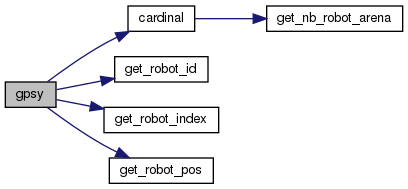
◆ gpsy()
| double gpsy | ( | arena * | arena, |
| int | num | ||
| ) |
return the y coordinate of the robot contained the id [num] in the arena [arena]. Return -1 if no robot has the id [num].
◆ peek()
| int peek | ( | robot * | rob, |
| int | addr | ||
| ) |
return the value stocked at the indice i of the robot [rob]'s memory. if an indice is invalid, it'll return -1.

◆ poke()
| bool poke | ( | robot * | rob, |
| int | addr, | ||
| int | value | ||
| ) |
Set the integer [value] to the indice [addr] in the robot [rob]'s memory. if the indice given is invalid (i.e, not contained between 0 and robot_memory) the operation will fail and it'll return false. if the operation succeed, it'll return true.

◆ randoms()
| int randoms | ( | int | num | ) |
Return a random number between 0 and [num].
◆ self()
| int self | ( | robot * | rob | ) |
return the id of the robot [rob].

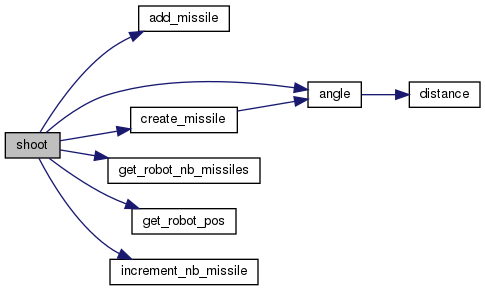
◆ shoot()
Shoot a missile from rob and add it to arena while assigning the angle [angle] and the explosion_distant [explo_dist] to the missile. If the robot has already NB_ROBOT_MISSILES active in the arena, the operation will fail and return false. If the operation succeed, it'll return true.
◆ speed()
| int speed | ( | robot * | rob | ) |
return the speed of the robot [rob].

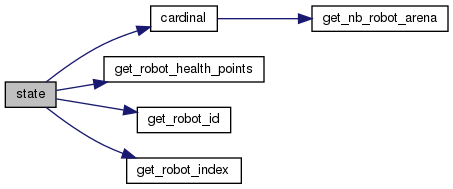
◆ state()
| int state | ( | arena * | arena, |
| int | num | ||
| ) |
return the number of health_points of the robot contained the id [num] in the arena [arena]. Return -1 if no robot has the id [num].
◆ targetx()
| double targetx | ( | double | x1, |
| double | angle, | ||
| double | length | ||
| ) |
Return the next coordinate X considering a x [x1] looking at [angle] which move at the speed [length].
◆ targety()
| double targety | ( | double | y1, |
| double | angle, | ||
| double | length | ||
| ) |
Return the next coordinate Y considering a y [y1] looking at [angle] which move at the speed [length].
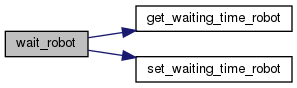
◆ wait_robot()
| int wait_robot | ( | robot * | rob, |
| unsigned int | delay | ||
| ) |
set the robot [rob] is waiting time to [delay] and return its value.